Data Preparation
The Importance of Data Preparation
Point cloud measurements are never perfect. They inevitably contain erroneous points that must be addressed before reliable analysis can begin. Effective preprocessing is therefore a critical first step in any professional workflow.
Noise and Outlier Removal
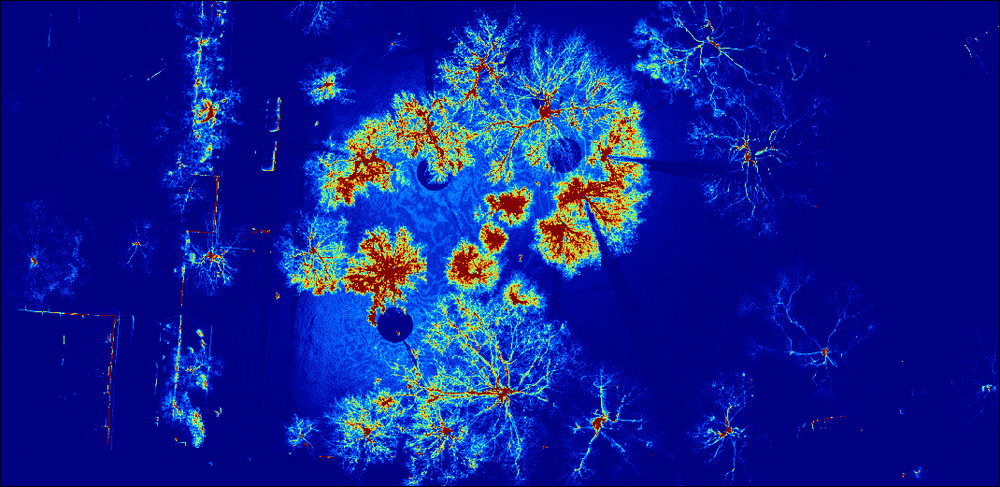
One common issue is noise and outliers caused by dirt, fog, multipath reflections, or even transient objects such as birds. Positive outliers (“air points”) are particularly problematic for tasks such as Digital Surface Model (DSM) generation, while negative outliers (“low points”) can significantly affect ground classification and the creation of accurate Digital Terrain Models (DTMs). LIS Pro 3D provides a comprehensive set of tools to handle these challenges - from simple isolated point filtering to dedicated low- and air-point filters, as well as methods for detecting and removing larger erroneous point clusters.
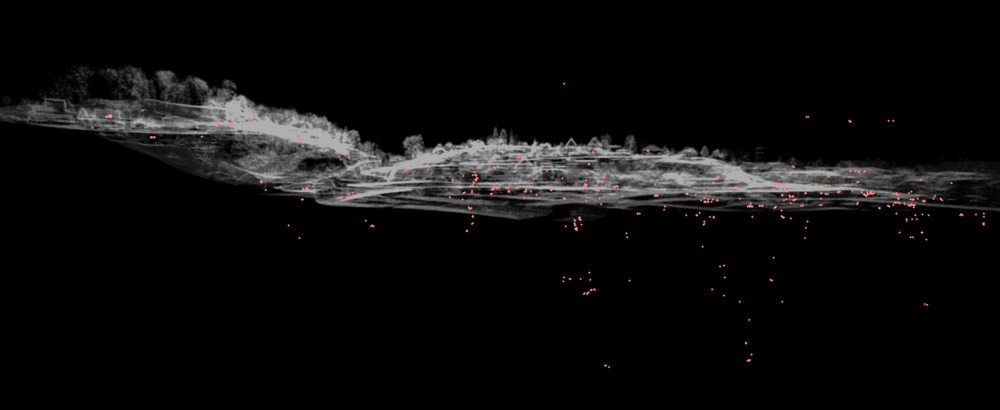
Detecting and labeling above and below ground outliers
Point Density Homogenization
Another important preprocessing step - especially for terrestrial laser scanning (TLS) data - is point density homogenization. In TLS datasets, point density is extremely high near the scanner and decreases with distance. Inhomogeneous densities also arise when merging multiple flight strips or scan positions. Without correction, this can increase computational effort, particularly for processes involving nearest-neighbor searches or mesh generation. LIS Pro 3D offers a range of thinning tools to standardize density efficiently. A widely used approach is 3D block thinning, where a single representative point is retained per voxel cube. The software provides flexible selection criteria, such as keeping the point closest to the voxel center, the point with maximum intensity, or the point with minimum deviation - allowing thinning strategies to be tailored to specific project needs.
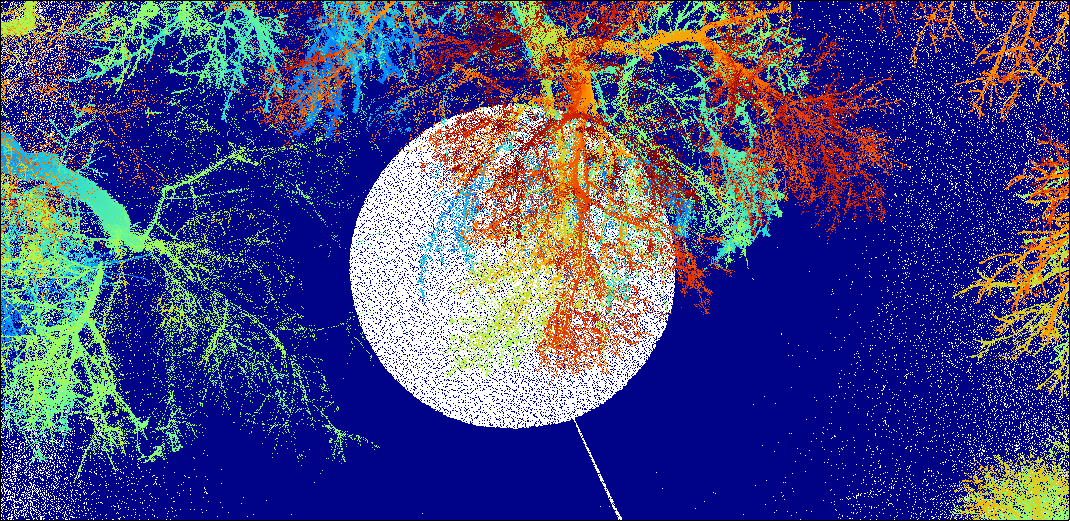
Raw TLS point cloud around a single scan position in full density as captured by the scanner - extremely high point density close to the scan position.
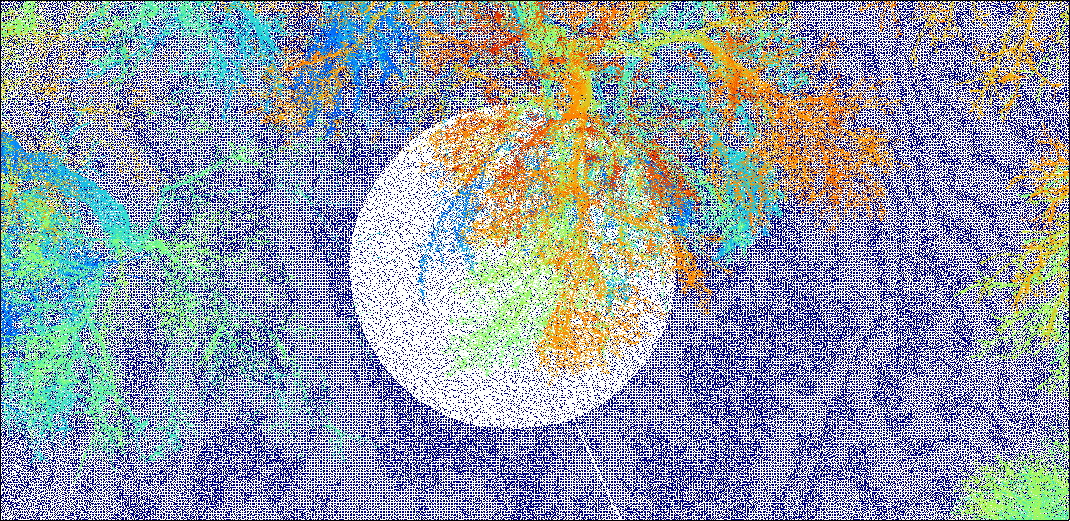
TLS point cloud of the very same scan position after thinning - significantly lower, more homogeneous point density throughout the scene
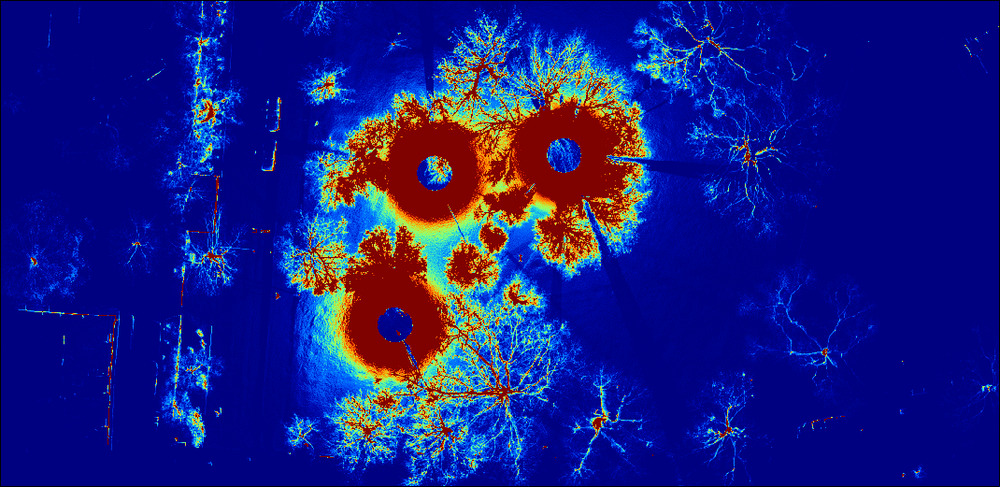
Rasterized point cloud density (pts/m²) as captured by three scan positions before thinning
Rasterized point cloud density (pts/m²) after thinning shows a notable reduction near the scan positions, resulting in a more spatially homogeneous distribution.
Processing Relevant Data Only - Spatial Subsetting & Attribute-based Filtering
Dataset extent is another key consideration. If the area of interest represents only a subset of the full dataset, the data should be spatially clipped accordingly, or managed through a virtual data catalog that loads only the relevant portion for analysis. Additionally, attribute-based filtering enables extraction of specific point subsets - for example, selecting only building-classified points from a pre-classified dataset or isolating high-intensity points such as road markings in mobile laser scanning (MLS) data.
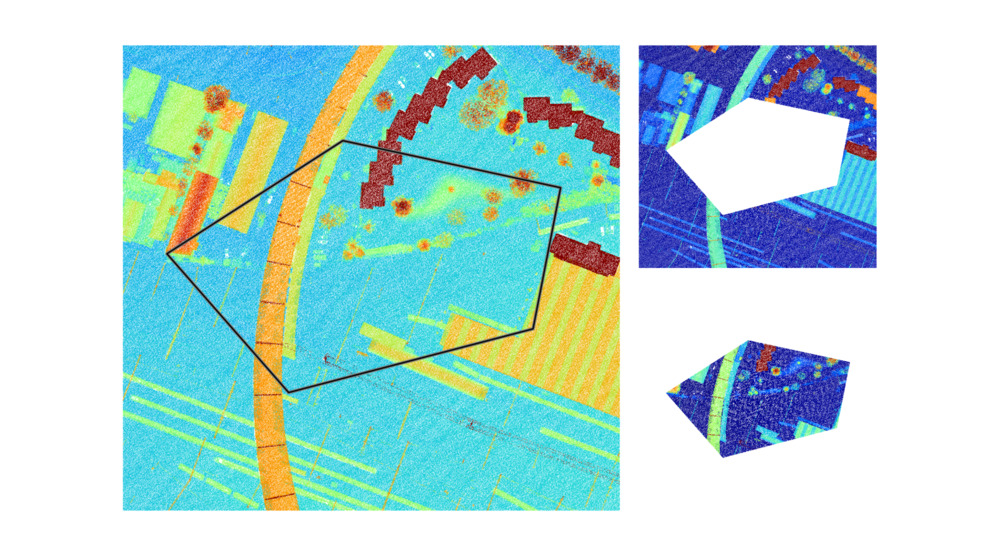
LIS Pro 3D offers a variety of tools for subsetting based on attributes and spatial extent, many of which can be used in regular or interactive mode, e.g., for interactive clipping of a point cloud subset. With these preprocessing capabilities, LIS Pro 3D ensures that point cloud data is optimized, consistent, and analysis-ready - forming a reliable foundation for accurate and efficient downstream processing.